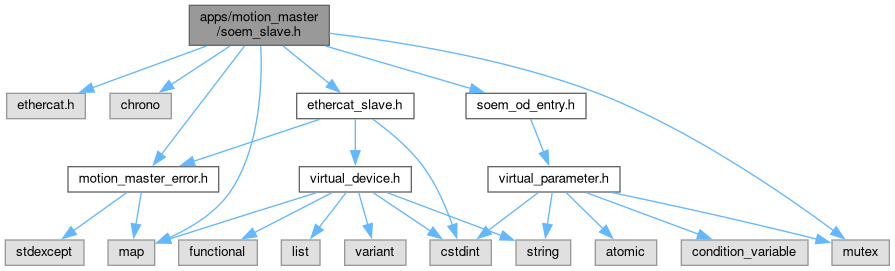
#include <ethercat.h>#include <chrono>#include <map>#include <mutex>#include <variant>#include "ethercat_slave.h"#include "motion_master_error.h"#include "soem_od_entry.h"
Include dependency graph for soem_slave.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | SoemSlave |
Macros | |
| #define | OTYPE_VAR 0x0007 |
| #define | OTYPE_ARRAY 0x0008 |
| #define | OTYPE_RECORD 0x0009 |
Macro Definition Documentation
◆ OTYPE_ARRAY
| #define OTYPE_ARRAY 0x0008 |
◆ OTYPE_RECORD
| #define OTYPE_RECORD 0x0009 |
◆ OTYPE_VAR
| #define OTYPE_VAR 0x0007 |
Generated by