AutoTuningGainsResult Class Reference
Holds the gains resulting from the autotuning process. More...
#include <standalone_autotuning.h>
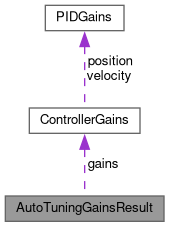
Collaboration diagram for AutoTuningGainsResult:
Public Attributes | |
| ControllerGains | gains |
| The resulting controller gains for velocity and position. | |
Detailed Description
Holds the gains resulting from the autotuning process.
This class is used to store the ControllerGains after performing an autotuning operation, which includes both velocity and position controller gains.
Member Data Documentation
◆ gains
| ControllerGains AutoTuningGainsResult::gains |
The resulting controller gains for velocity and position.
The documentation for this class was generated from the following file:
- libs/standalone_autotuning/standalone_autotuning.h
Generated by