#include <ethercat_master.h>
Public Member Functions | |
| virtual | ~EthercatMaster ()=default |
| virtual size_t | start ()=0 |
| Start the EtherCAT master. | |
| virtual void | stop ()=0 |
| Stop the EtherCAT master. | |
| virtual size_t | restart ()=0 |
| Restart the EtherCAT master. | |
| virtual int32_t | execute (uint64_t pending_signals)=0 |
| Main EtherCAT master loop function to be executed at one millisecond interval. | |
| virtual bool | is_running ()=0 |
| Check if the EtherCAT master is currently running. | |
| virtual int | get_slaves_responding ()=0 |
| Return the number of slaves actually responding on the bus. | |
| virtual std::list< VirtualDevice * > | get_slaves ()=0 |
| Get all of the available slaves. | |
| virtual bool | disable_all_slaves ()=0 |
| Switch all slaves to PREOP. | |
Constructor & Destructor Documentation
◆ ~EthercatMaster()
|
virtualdefault |
Member Function Documentation
◆ disable_all_slaves()
|
pure virtual |
Switch all slaves to PREOP.
- Attention
- Must be implemented as non-blocking!
- Returns
- true on success, false otherwise
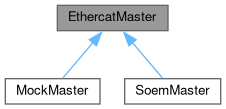
Implemented in EthernetMaster, MockMaster, and SoemMaster.
◆ execute()
|
pure virtual |
Main EtherCAT master loop function to be executed at one millisecond interval.
- Returns
- error if any
Implemented in EthernetMaster, MockMaster, and SoemMaster.
◆ get_slaves()
|
pure virtual |
Get all of the available slaves.
- Returns
- map of available slaves
Implemented in EthernetMaster, MockMaster, and SoemMaster.
◆ get_slaves_responding()
|
pure virtual |
Return the number of slaves actually responding on the bus.
- Returns
- number of responding slaves
Implemented in EthernetMaster, MockMaster, and SoemMaster.
◆ is_running()
|
pure virtual |
Check if the EtherCAT master is currently running.
- Returns
- true if currently running, false otherwise
Implemented in EthernetMaster, MockMaster, and SoemMaster.
◆ restart()
|
pure virtual |
Restart the EtherCAT master.
This function deactivates the master (and slaves) and activates it again
- Returns
- the number of responding slaves
- Exceptions
-
std::runtime_error
Implemented in EthernetMaster, MockMaster, and SoemMaster.
◆ start()
|
pure virtual |
Start the EtherCAT master.
- Returns
- the number of initially responding slaves
Implemented in EthernetMaster, MockMaster, and SoemMaster.
◆ stop()
|
pure virtual |
Stop the EtherCAT master.
Implemented in EthernetMaster, MockMaster, and SoemMaster.
The documentation for this class was generated from the following file:
- apps/motion_master/ethercat_master.h
Generated by